Inertial Navigation Sensors, or INS for short, have really become a big deal these days, especially in stuff like aerospace and autonomous cars. I mean, they’re pretty much the go-to for getting accurate position info on the fly. I recently came across a report from Grand View Research — you know, one of those industry studies — and it predicts that the global market for these systems will hit around $11.62 billion by 2025. That’s pretty impressive, especially considering it’s growing at roughly 6.8% each year since 2019. It just shows how crucial INS technology has become in making navigation more precise and dependable.
People who really know their stuff, like Dr. Emily Zhang — a recognized expert in this field — have said that the secret sauce to better positioning is combining these sensors with advanced algorithms. Her words were something like, “The key to enhancing positioning systems lies in the integration of advanced algorithms with inertial navigation sensors to reduce drift and improve location precision.” Basically, she’s saying that you can’t just rely on the sensors alone; you gotta pair them with smart computational techniques to get better accuracy.
As more industries depend on INS for critical missions, it’s super important to understand how to make the most of these sensors. Thanks to ongoing tech advances and new algorithms, there’s a big opportunity for businesses and researchers to step up their game and boost navigation accuracy. So, as we look into the best ways to use INS effectively, it’s essential to stay up-to-date on the latest developments and best practices — that’s how you get those truly reliable positioning results.

Understanding Inertial Navigation Sensors and Their Functionality
Inertial navigation sensors are key components in modern positioning systems, relying on accelerometers and gyroscopes to calculate position, orientation, and velocity without the need for external references. These sensors facilitate various applications, including aerospace, automotive, and mobile devices, by detecting changes in motion and providing real-time feedback. According to a report by MarketsandMarkets, the inertial navigation system market is projected to reach $13.28 billion by 2026, growing at a CAGR of 9.83% from 2021, reflecting the increasing demand for accurate and reliable positioning solutions across industries.
Understanding the functionality of inertial navigation sensors is crucial for their effective use. These sensors work by measuring the specific forces acting upon an object, thereby integrating these measurements over time to estimate changes in position. Notably, the error associated with inertial navigation can accumulate over time, a problem known as drift. Studies indicate that advanced algorithms can mitigate drift, enhancing accuracy by incorporating data from other sources, such as Global Navigation Satellite Systems (GNSS). A report from Research and Markets highlighted that the integration of GNSS data with inertial sensors could improve overall positional accuracy by up to 50%, showcasing the importance of combining different technological inputs to achieve optimal performance in navigation systems.
Types of Inertial Navigation Sensors Used in Modern Positioning Systems
Inertial navigation sensors are pivotal in modern positioning systems, providing precise data crucial for various applications, from aerospace to robotics. There are several types of inertial navigation sensors used today, each with distinct functionalities. The most common types are accelerometers and gyroscopes.
Accelerometers measure changes in velocity, allowing systems to determine changes in position. Gyroscopes track rotational movement, providing orientation data that, combined with accelerometer data, enhances overall positioning accuracy.
According to a report by the International Society of Automation, the global market for inertial navigation systems is anticipated to reach approximately $16.5 billion by 2026, indicating a growing reliance on these technologies across multiple sectors. Additionally, the integration of micro-electromechanical systems (MEMS) technology has significantly improved the compactness and cost-effectiveness of these sensors, making them increasingly accessible to consumer-grade products and smaller organizations.
Tips: When implementing inertial navigation sensors, ensure proper calibration to minimize errors and improve data accuracy. It's also essential to fuse data from other sensor types, like GPS, to compensate for drift in inertial systems. Regular maintenance and updates can enhance sensor performance and longevity, keeping positioning systems reliable and efficient.
Fundamentals of Sensor Fusion in Positioning Applications
Sensor fusion is a pivotal process in achieving accurate positioning, particularly in applications utilizing inertial navigation sensors. By integrating data from multiple sensors, such as accelerometers, gyroscopes, and GPS, sensor fusion enhances the reliability and precision of position estimates. According to a report from Markets and Markets, the global sensor fusion market is projected to grow from USD 5.4 billion in 2020 to USD 12.2 billion by 2025, driven by advancements in technology and increased demand across various sectors.
The fundamentals of sensor fusion rely heavily on sophisticated algorithms that evaluate the strengths and weaknesses of each sensor type. For instance, while inertial sensors provide high-frequency motion data, they are prone to drift over time. In contrast, GPS signals offer great positional data but can falter in environments with limited satellite visibility. By employing techniques like Kalman filtering or complementary filtering, systems can optimally combine these inputs, effectively mitigating individual sensor errors and improving overall accuracy. A study by IEEE indicates that systems utilizing sensor fusion techniques can achieve positioning accuracy improvements of up to 50% compared to standalone inertial measurement or GPS systems.
Understanding the intricacies of sensor fusion is essential for the development of applications in autonomous vehicles, robotics, and mobile devices. Enhanced accuracy not only increases performance but also contributes to safety, especially in critical applications where precise positioning is paramount. As the landscape of technology continues to evolve, the importance of sensor fusion in achieving reliable positional data will only grow, marking it as a fundamental aspect of future navigation solutions.
Calibration Techniques for Enhancing Sensor Accuracy
Calibration techniques are crucial for enhancing the accuracy of inertial navigation sensors, which are widely used in various applications, from aerospace to robotics. To achieve reliable positioning, it is essential to regularly calibrate these sensors to account for factors such as temperature variations, sensor drift, and initial alignment errors. One effective method of calibration involves the use of reference points or known locations during the sensor's operation. By comparing the sensor's measurements with these reference points, users can identify and correct systematic errors in the readings.
Tips for effective calibration include conducting tests in different environmental conditions to ensure robustness against varying scenarios. Additionally, implementing a systematic approach to gather data during stationary and dynamic phases can provide deeper insights into the sensor’s performance. Regularly updating the calibration parameters based on this data can significantly reduce accumulated errors, leading to improved overall positioning accuracy.
Another valuable calibration technique is the use of mathematical models to predict sensor behavior. By applying algorithms that can compensate for known biases and errors, operators can refine measurement accuracy further. Incorporating machine learning techniques for sensor data analysis may also enhance calibration processes, allowing for real-time adjustments based on detected anomalies. By adopting these strategies, users can maximize the efficacy of their inertial navigation systems.
Challenges and Limitations in Inertial Navigation Systems
Inertial navigation systems (INS) rely on sensors, such as accelerometers and gyroscopes, to calculate the position and orientation of an object without external references. However, several challenges and limitations can arise in the use of these sensors, affecting the overall accuracy and reliability of the navigation data.
One primary concern is sensor drift, which occurs due to accumulated errors over time from small inaccuracies in measurements. As the system operates continuously, these errors can lead to significant deviations from the true position, especially in long-duration applications.
Another notable challenge is the sensitivity of inertial navigation sensors to external disturbances. Variations in environmental conditions, such as vibrations, temperature changes, or magnetic fields, can introduce noise and errors, further complicating the task of achieving precise navigation.
Additionally, the lack of a global positioning reference can make it challenging to correct drift errors, necessitating complex algorithms and sensor fusion techniques to enhance the overall performance of the navigation system. As a result, effective utilization of inertial navigation sensors requires a comprehensive understanding of these challenges and the implementation of strategies to mitigate their impacts.
Applications of Inertial Navigation Sensors Across Various Industries
Inertial navigation sensors have emerged as critical components in a variety of industries, significantly enhancing positioning accuracy and reliability. In the aerospace sector, these sensors are integral to the navigation systems of aircraft and spacecraft. By continuously measuring accelerations and rotations, they provide precise data that is crucial for maintaining stable flight paths and performing complex maneuvers in real-time. Similarly, the marine industry utilizes inertial navigation for submarine and ship navigation, where GPS signals can be unreliable due to environmental conditions.
In the automotive industry, inertial sensors play a vital role in advanced driver-assistance systems (ADAS) and autonomous driving technologies. They support various functionalities, from stability control to more sophisticated features like lane-keeping and collision avoidance. Additionally, the construction and robotics fields benefit from these sensors for accurate positioning and movement tracking of machinery and robots, which enhances productivity and safety on job sites.
**Tip 1:** When integrating inertial navigation sensors, ensure they are calibrated correctly to minimize drift over time, enhancing long-term accuracy.
**Tip 2:** Consider combining inertial sensors with other navigation technologies, such as GPS or visual odometry, to create a more robust navigation solution that can compensate for the limitations of any single system.
Future Trends and Innovations in Inertial Navigation Technology
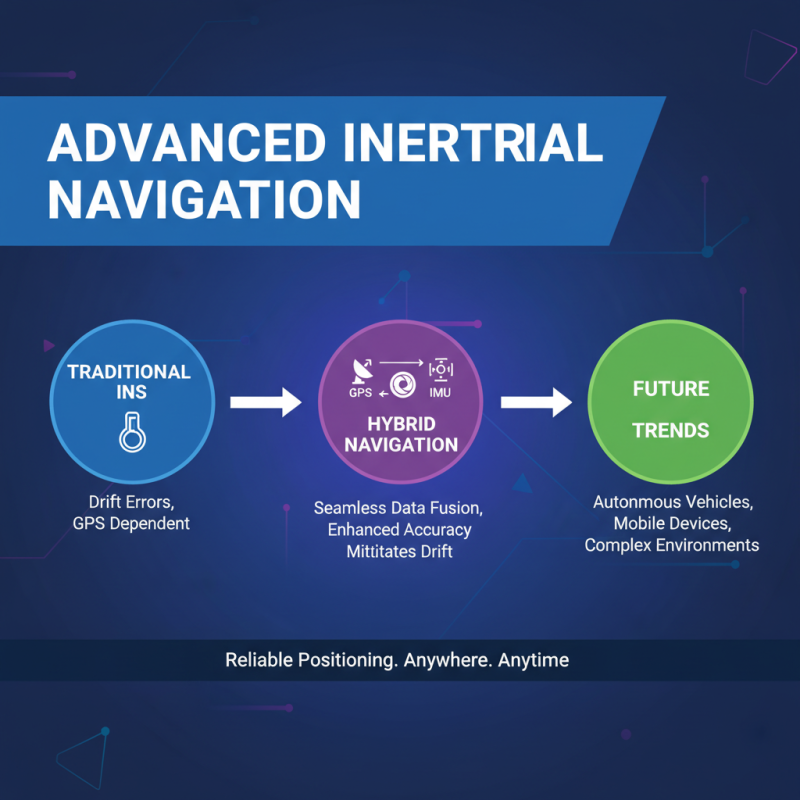
The realm of inertial navigation technology is evolving rapidly, with innovative advancements promising to enhance positioning accuracy for a variety of applications, from autonomous vehicles to mobile devices. Future trends indicate a shift toward integration with other sensor modalities, such as GPS and visual odometry, allowing for seamless data fusion. This hybrid approach can significantly mitigate the drift errors often associated with traditional inertial navigation systems, making them more reliable in complex environments where GPS signals may be weak or unavailable.
Another promising trend is the miniaturization and cost reduction of inertial sensors, driven by advances in micro-electromechanical systems (MEMS) technology. As these sensors become more compact and affordable, they will find their way into a broader spectrum of consumer electronics, enhancing everyday applications like augmented reality and fitness tracking. Moreover, machine learning algorithms are being employed to improve the interpretation of sensor data in real-time, allowing for more responsive and accurate positioning solutions.
Tips for implementing inertial navigation sensors effectively include ensuring proper calibration to maintain accuracy, regularly updating the sensor software to leverage the latest algorithms for data processing, and considering environmental factors that may affect sensor performance. Additionally, exploring sensor fusion techniques can provide a more robust solution, minimizing the limitations of individual sensors and enhancing overall system reliability.
Enhancing Positional Accuracy in GPS-denied Environments: Insights from Industry Reports on Integrated INS1700 Anti-jamming Navigation Solutions
In environments where GPS signals are unreliable or absent, enhancing positional accuracy has become a critical challenge for industries relying on precise navigation. Insights from recent industry reports underline the increasing necessity for integrated navigation solutions that combine Inertial Navigation Systems (INS) with satellite navigation technologies. The trend reveals that systems utilizing fiber optic gyroscopes (FOGs) and MEMS accelerometers, alongside support for multiple global navigation satellite systems (GNSS) such as GPS, BDS, GLONASS, and Galileo, are achieving notable success in providing superior accuracy and reliability.
A significant advantage of advanced INS technology lies in its capability to deliver real-time data on critical navigation parameters, including heading, attitude, speed, and position. This data is essential for applications ranging from autonomous vehicles to inspections and maintenance tasks in sectors like agriculture, mining, and marine operations. By implementing such integrated navigation systems, organizations can reduce the reliance on human intervention, which not only enhances operational efficiency but also minimizes the risk of overlooking potential issues early in the process.
Furthermore, the compact design and low power consumption of these systems make them suitable for a variety of platforms, facilitating seamless integration with external sensors such as odometers and depth velocity logs. As industries continue to push the boundaries of automation, the demand for robust navigation solutions that thrive in GPS-denied environments is expected to grow, driving innovation and enhancing operational capabilities.
FAQS
: Sensor fusion is the process of integrating data from multiple sensors, such as accelerometers, gyroscopes, and GPS, to enhance the reliability and precision of position estimates. It is important for achieving accurate positioning, especially in applications like autonomous vehicles and robotics.
Systems that utilize sensor fusion techniques can achieve positioning accuracy improvements of up to 50% compared to standalone inertial measurement or GPS systems, by effectively combining inputs and mitigating individual sensor errors.
Common algorithms used in sensor fusion include Kalman filtering and complementary filtering, which evaluate the strengths and weaknesses of different sensor types and optimize the combination of their data.
Calibration is necessary to enhance the accuracy of inertial navigation sensors by accounting for factors such as temperature variations, sensor drift, and alignment errors, ensuring reliable positioning over time.
Effective calibration methods include using reference points during operation to compare sensor measurements, conducting tests in various environmental conditions, and systematically updating calibration parameters based on gathered data.
Machine learning techniques can enhance sensor calibration processes by allowing for real-time adjustments based on detected anomalies, improving measurement accuracy and performance of inertial navigation systems.
Inertial navigation sensors are used in several industries, including aerospace for aircraft and spacecraft navigation, marine for submarine and ship navigation, automotive for advanced driver-assistance systems, and construction and robotics for accurate positioning and movement tracking.
It is important to ensure that inertial navigation sensors are calibrated correctly to minimize drift over time and to consider combining them with other navigation technologies, like GPS, for a more robust solution.
Conclusion
Inertial Navigation Sensors play a crucial role in modern positioning systems, offering precise location data through various types of technologies. These sensors function by measuring acceleration and angular velocity, which enables them to determine motion relative to a known starting point. The integration of sensor fusion techniques enhances positioning accuracy by combining data from multiple sources, mitigating errors that may arise from individual sensors.
However, challenges such as drift and sensor calibration must be addressed to optimize performance. Despite these limitations, Inertial Navigation Sensors have found diverse applications across industries—from aerospace to robotics—signifying their versatility and importance. Looking ahead, ongoing innovations in sensor technology are expected to further improve their functionality and precision, paving the way for new advancements in navigation systems.
 TBSD60
TBSD60 BSD120
BSD120 BSD98
BSD98 BSD70
BSD70 BSD60
BSD60 BSD50
BSD50 BSD217
BSD217 INS1700
INS1700 INS970
INS970 INS570
INS570 INS170
INS170 SLA-4B1L1-65
SLA-4B1L1-65 SLA-4B1L1-130
SLA-4B1L1-130 SLA-8B1L1-165
SLA-8B1L1-165 DIVER 101
DIVER 101 DIVER 102
DIVER 102 DIVER 103
DIVER 103 DIVER 104
DIVER 104 DIVER 105
DIVER 105 DIVER 106
DIVER 106 SLLR3000
SLLR3000 SLLR905
SLLR905 SLLD25
SLLD25 160M
160M 170M
170M SLFC-70
SLFC-70 SLAF280
SLAF280 MR360
MR360